About Me
I am currently a final (fifth) year Ph.D. student in the Chair of Cyber-Physical Systems in Production Engineering, School of Engineering and Design at the Technical University of Munich (TUM) under the supervision of Prof. Dr. Marco Caccamo. Before my Ph.D study, I received my M.Eng. degree in Mechanical Engineering with a specialization in computer vision for industrial applications from Zhejiang University, China in 2020. I received my B.S. degree in Mechanical Design and Automation from Shandong University, China in 2017.
Interests
- Robot Learning
- Deep Reinforcement Learning
- Control Theory
Education
PhD Computer science
Technical University of Munich, Germany
MEng Mechanical Engineering
Zhejiang University, China
BSc Mechanical Engineering
Shandong University, China
My Research
My research focuses on the intersection of machine learning and control theory, addressing real-world challenges in intelligent decision-making problems for autonomous systems. I am particularly interested in designing algorithms that integrate the strengths of data-driven and control-theoretic approaches to achieve safe and data-efficient learning-based control and planning in real-world robot applications.
Featured Publications
Recent Publications
(2024).
Physics-model-guided Worst-case Sampling for Safe Reinforcement Learning.
arXiv preprint.
(2024).
Simplex-enabled Safe Continual Learning Machine.
arXiv preprint arXiv:2409.05898.
(2024).
Equivariant Ensembles and Regularization for Reinforcement Learning in Map-based Path Planning.
2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
(2024).
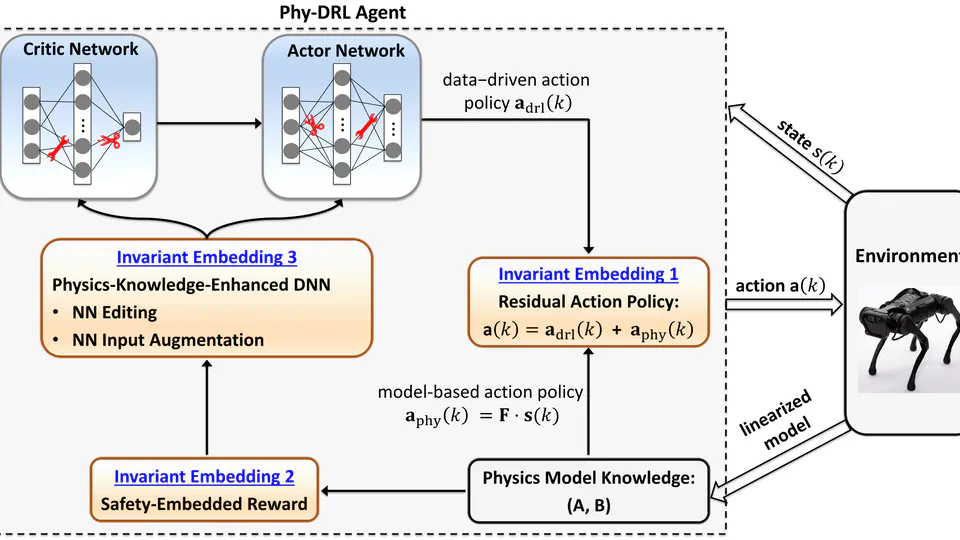
Physics-Regulated Deep Reinforcement Learning: Invariant Embeddings.
The Twelfth International Conference on Learning Representations (ICLR).
(2023).
6IMPOSE: Bridging the reality gap in 6D pose estimation for robotic grasping.
Frontiers in Robotics and AI.